
Project: Sisyphus Table
Overview: The overall goal of this project is to create a miniaturized desktop version of the Sisyphus kinetic sand table.

Project Criteria:
Must Haves:
Ability to draw different patterns
Mechanism max height of 33mm to fit in given metal enclosure
Should Have:
Powered by a singular plug
Quite
Nice to Have:
Bluetooth control
Inverse Kinematics

Past Iterations





Build Updates

Video Coming Soon
Build Update: 3/7/2025
The new design works significantly better. There is noticeably less friction in the system and the power supply is pulling half the amps it was previously. I need to look into a new nonmagnetic material for the center screws.
At the same time, I’m also going to start designing a custom circuit board to replace the current setup


Build Update: 3/6/2025
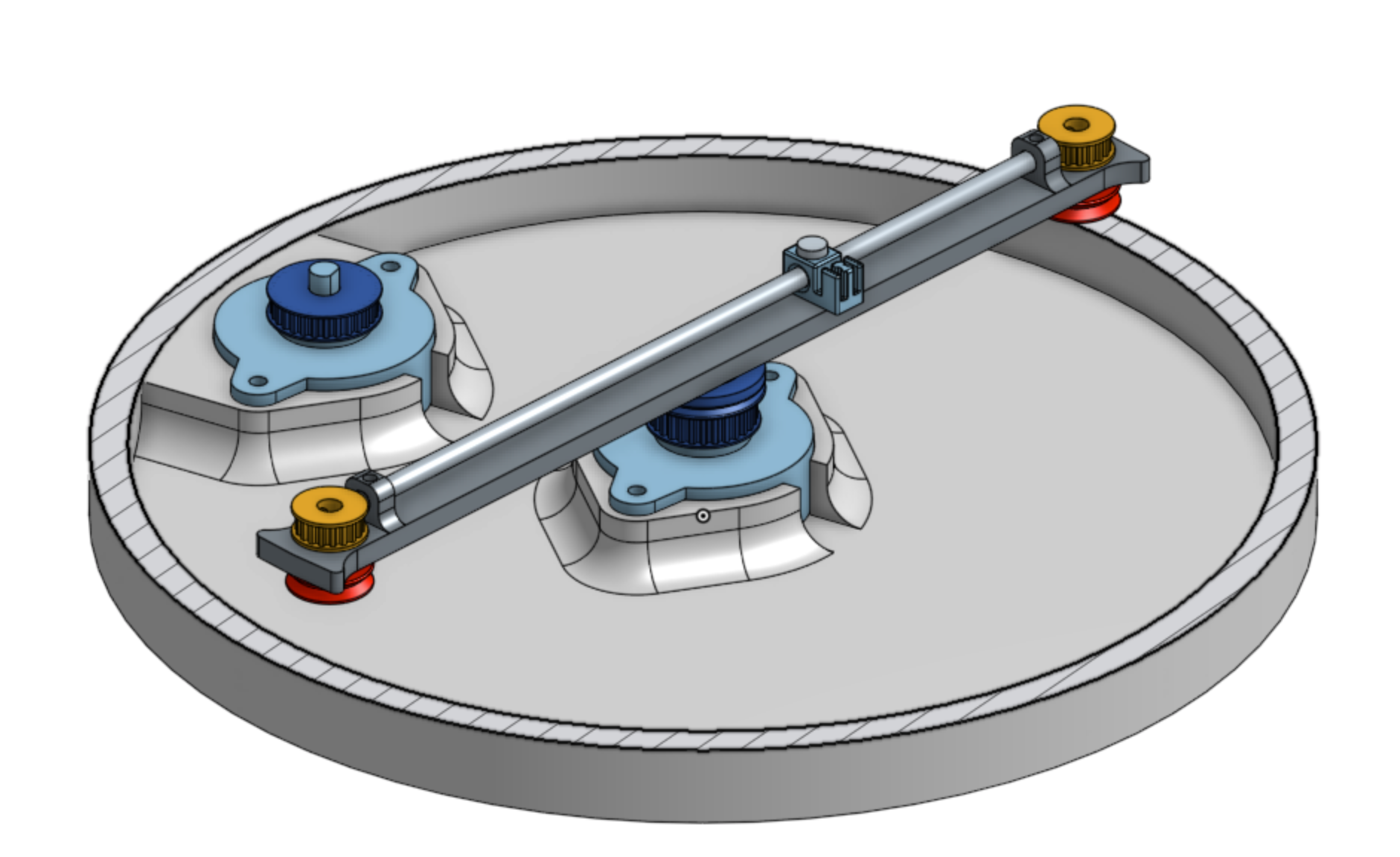
I realized the gearbox jams when the driven gears accidentally mesh with the center gear directly above and below. Currently, In the design, nothing is stopping the driven gears from shifting up and down and both gears run face to face. I think the solution is to separate the center gears.
The solution I came up with was to to lower the bottom Center gear and driven gear into the mounting plate of the motor. This allowed me to continue to use the same gears and add a spacer between the two gears. Will update when all the parts print
Build Update: 3/5/2025
I printed all the components to test for full mechanism assembly. Movement is generally smooth, but there are jitters and sometimes complete jams. This could be due to 3D-printed gears. I am looking into getting both center gears machined out of aluminum. Also, it seems the screws are magnetic and cause the carriage to flick towards the center.
Build Update: 3/3/2025
Printed preliminary components to test control of both DC motors with the microcontroller and an external power supply

Build Update: 3/2/2025
Solidered microcontroller to motor driver temporarily to mechanical system movement.